
Mass on a Spring
Brief Description
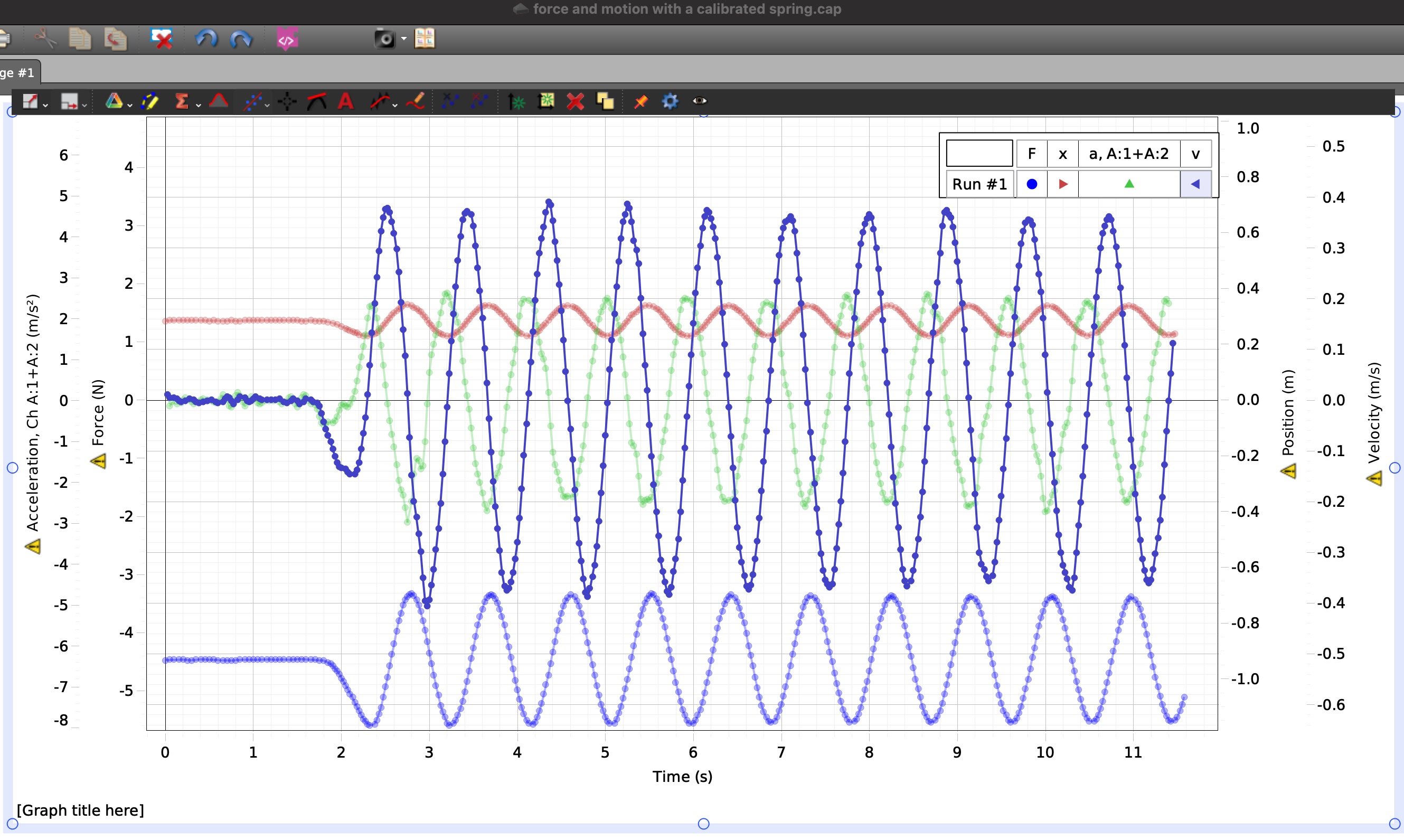
The physics of a mass-spring system is defined by Hooke's Law, which states that the restoring force exerted by a spring is directly proportional to its displacement from equilibrium, expressed as F=−kx. Here, k represents the spring constant (stiffness) and x is the distance the mass has moved from its resting position. When the mass is released, this linear restoring force accelerates it back toward equilibrium, but its momentum carries it past that point, creating Simple Harmonic Motion (SHM). This motion is characterized by a continuous exchange between elastic potential energy, stored in the stretched or compressed spring, and kinetic energy as the mass moves.
Materials
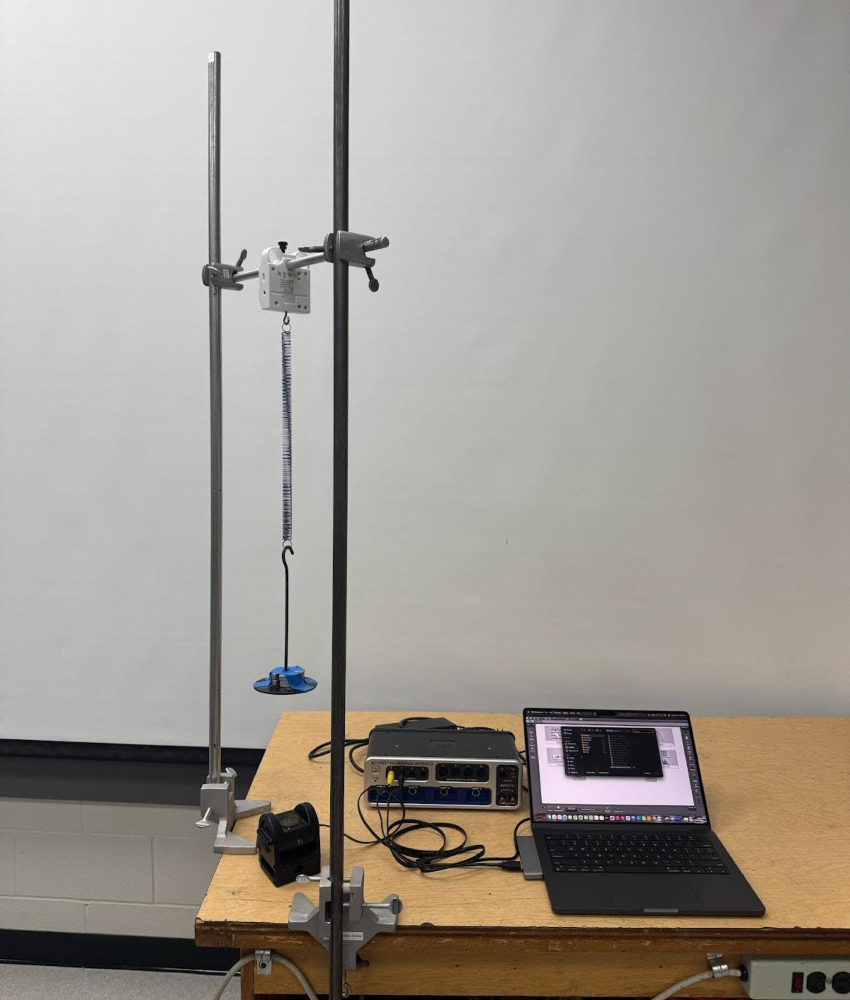
Three metal rods, two table clamps, two 90° angle clamps, an 850 universal interface, motion detector, wireless force sensor, calibrated spring of 20 N/m, a hanging mass of about 200 g, and a laptop with the capstone program installed.

Set-up
At one of the corner of the roll out table set up the motion and force sensor as it is in the photo. Connect the laptop to the 850 interface. Connect the motion sensor to the 850 interface, and make sure the wireless force sensor is connecting with the capstone program. In the capstone program open up the file labeled “force and motion with a calibrated spring”, and make sure the program is registering both the force sensor and the motion sensor. Place the spring on the force sensor, and place the hanging mass on the spring. Make sure that the hanging mass is directly above the motion sensor.
Charge the wireless force sensor for a least an hour before the class that this demo is needed.
Performing the Demo
Put the mass into an oscillating motion by pulling down on or pushing up on it. After the mass is in motion start the Capstone program with the graph displayed to the class via projector.
Safety and Other Notes
There are no safety issues that I can think of. Charge the wireless force sensor for a least an hour before the class that this demo is needed.